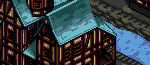
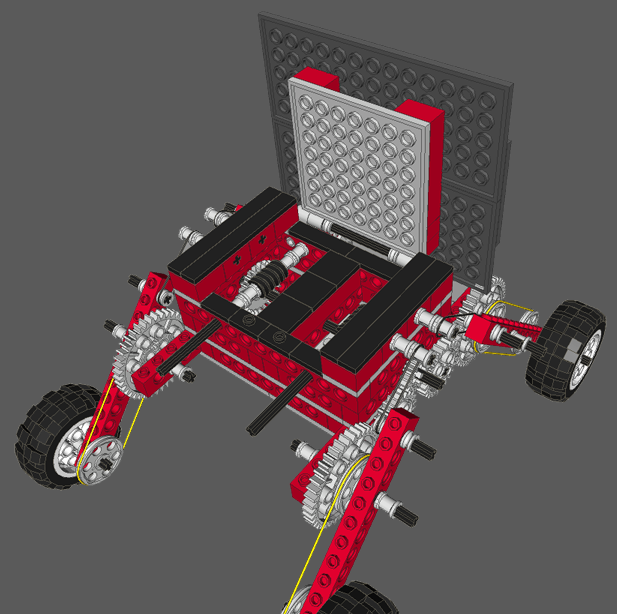
Great feedback MoD! About the pulleys; I tried a total of 3 solutions to that problem. I tried it with gears, chains, and the pulleys as you can see. The chains caused too much friction and was bogging the gear rotation. The gear solution also had friction, but not as much. In the end I just went with what looked the best....though the chains looked pretty neat as well. I'll play around with that a bit more. As far as motors go, I'm buying them very soon along with a set of pneumatics that will be used on a scoop-type-device for this rover. I plan to hook up the motors to the 2 protruding drive shafts you see there in the picture. those drive shafts are then connected to a 'worm' gear. That worm gear is then connected to a crown tooth gear which then spins the shaft which, in turn, spins all of the external gears you see in those pics. I designed the rover with an opening 'hood' so you can fix the rover both in and out without disassembling anything.
here is a pic with the hood open:
You see, back when I was a wee lil lad (back in the 6th grade), I was part of a geeky team called the "Mars Rover" team. The goal was to design a rover in which could accomplish certain tasks such as climb a certain degree incline, or pick up a number of rocks, be under a certain weight, complete an obstacle course, and others. It was a HUGE competition held up in Idaho; tons of kids everywhere. Very fun, yet also nerve-racking.
My team:

I'm the scrawny kid in the middle. Wasn't I just adorable?
Recently I've been having a bit of nostalgia. I went on a whim to the Lego Education website and bought myself a whole slew of Mindstorm Legos in bulk (ones that matched the pieces found in the competitions sets). The only things not included were the motors and pneumatics which I am ordering soon. Anyway, I wanted to design a rover that'd kick that competition's butt if it were to be entered. To my knowledge, there has been no rover entered into the competition with a working shock system, thus that obviously was my goal.
And the wheels, that was simply an oversight. Thanks for pointing that out.